System description
Structure
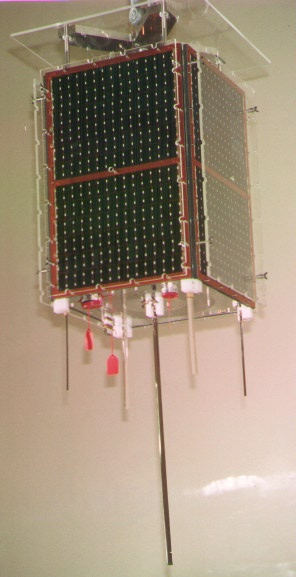
 PoSAT's
modular structure
is composed by 11 stacked
aluminium trays
each one containing the electronics of the different subsystems. The first tray at the base of the satellite, containing the batteries and the remote sensing cameras, is followed by two trays with the rf-system. The following trays contain the power conditioning and distribution module, the telecommand and telemetry unit, the main OBC, the star sensor module and the GPS receiver, the secondary OBC, the transputer unit, the digital processing unit and the ADCS module. On the top are mounted the ADCS sensors and the boom with its tipmass. The solar panels are mounted on the four sides. The satellite is parallelepiped in shape with dimensions 35×35×58 cm and has a final mass just under 50 kg.
PoSAT's
modular structure
is composed by 11 stacked
aluminium trays
each one containing the electronics of the different subsystems. The first tray at the base of the satellite, containing the batteries and the remote sensing cameras, is followed by two trays with the rf-system. The following trays contain the power conditioning and distribution module, the telecommand and telemetry unit, the main OBC, the star sensor module and the GPS receiver, the secondary OBC, the transputer unit, the digital processing unit and the ADCS module. On the top are mounted the ADCS sensors and the boom with its tipmass. The solar panels are mounted on the four sides. The satellite is parallelepiped in shape with dimensions 35×35×58 cm and has a final mass just under 50 kg.
Power system

 Four solar panels
, each one comprising of 1344 GaAs cells, constitute the power source for all on board systems. To allow for a continuous and controlled energy supply in LEO (Low Earth Orbit),
10 NiCd batteries
are indirectly recharged by the solar cells, while the Power Conditioning module controls the distribution of the 18W of power.
Four solar panels
, each one comprising of 1344 GaAs cells, constitute the power source for all on board systems. To allow for a continuous and controlled energy supply in LEO (Low Earth Orbit),
10 NiCd batteries
are indirectly recharged by the solar cells, while the Power Conditioning module controls the distribution of the 18W of power.
On-board computer system (OBC)
 The
OBC
unit performs all the processing related to communications, telecommanding and telemetry, housekeeping, and also controls the payloads. The main microprocessor is an INTEL-80C186 running at 8MHz with 512kByte of RAM and one PROM for booting. The system interfaces with a 16Mb RAMDISK. For redundancy, a second OBC module has been integrated, based on an INTEL-80C188 running at 8MHz with 512kByte of RAM.
The
OBC
unit performs all the processing related to communications, telecommanding and telemetry, housekeeping, and also controls the payloads. The main microprocessor is an INTEL-80C186 running at 8MHz with 512kByte of RAM and one PROM for booting. The system interfaces with a 16Mb RAMDISK. For redundancy, a second OBC module has been integrated, based on an INTEL-80C188 running at 8MHz with 512kByte of RAM.
Communication system
 The communication system of PoSAT-1 consists of a rf-system,
antennas
(one VHF monopole for reception and 4 UHF monopoles for transmission), receivers and transmitters (2 and 10 Watts), modulators (FSK at 9600bps and 34.4 kbps) and demodulators (FSK at 9600bps, AFSK 1200) which interface to the telecommand&telemetry module, to the store&foreward communication system and to the digital signal processing unit.
The communication system of PoSAT-1 consists of a rf-system,
antennas
(one VHF monopole for reception and 4 UHF monopoles for transmission), receivers and transmitters (2 and 10 Watts), modulators (FSK at 9600bps and 34.4 kbps) and demodulators (FSK at 9600bps, AFSK 1200) which interface to the telecommand&telemetry module, to the store&foreward communication system and to the digital signal processing unit.
Attitude determination and control
 Attitude determination is performed by an
external magnetometer
(the internal magnetometer was used only until the deployment of the gravity gradient boom), a set of
Earth horizon sensors
and
Sun sensors.
The passive stabilisation system is based on the deployed gravity gradient boom and magnetorquers on each of the satellites sides.
Attitude determination is performed by an
external magnetometer
(the internal magnetometer was used only until the deployment of the gravity gradient boom), a set of
Earth horizon sensors
and
Sun sensors.
The passive stabilisation system is based on the deployed gravity gradient boom and magnetorquers on each of the satellites sides.
Thermal design and housekeeping
- The thermal design of PoSAT-1 is based on a lumped parameter finite difference thermal model. To assure the mean temperature of 10°C at the battery modules and an even distribution of Sun irradiance onto the solar panels, in order to optimise their efficiency, PoSAT-1 has to perform a very slow spin about its z-axis.
Ground segment
 The
Ground Segment
of the PoSAT-1 system comprises a
command and control station
, which is located in Portugal at the Operational Center of Satellites of the Continent from the Portuguese company Radio Marconi, in Sintra. All the operations of TT&C are performed from this station. The ground station at the University of Surrey,UK, operates as a back up station for the TT&C. The ground station at LAER, INETI, operates as a back up station for the User Segment.
The
Ground Segment
of the PoSAT-1 system comprises a
command and control station
, which is located in Portugal at the Operational Center of Satellites of the Continent from the Portuguese company Radio Marconi, in Sintra. All the operations of TT&C are performed from this station. The ground station at the University of Surrey,UK, operates as a back up station for the TT&C. The ground station at LAER, INETI, operates as a back up station for the User Segment.
Payloads
Earth Imaging System (EIS)
- The PoSAT-1 Earth Imaging System comprises two CCD cameras working in parallel but with different fields of view. One camera covers areas on the Earth of 1232×1267 km at 2.2 km resolution (wide angle camera), while the other covers regions of 123×127 km at 220 m resolution (narrow angle camera). All images are compressed by the transputers and stored on the RAMDISK prior to downloading.
Star Imaging System (SIS)
 The
star imaging system
captures a set of star image frames (with 576×284 pixels and 9.7°×7.2° resolution) sequentially, detects the stars in the images and searches for the observed star pattern in a star catalogue. Having achieved the final matching, and with the help of accurate position knowledge via the on-board GPS, an accurate attitude can be obtained.
The
star imaging system
captures a set of star image frames (with 576×284 pixels and 9.7°×7.2° resolution) sequentially, detects the stars in the images and searches for the observed star pattern in a star catalogue. Having achieved the final matching, and with the help of accurate position knowledge via the on-board GPS, an accurate attitude can be obtained.
GPS experiment (GPS)
 The GPS consists of a
GPS antenna
mounted on the face of the satellite and a receiver which interfaces with the transputer processing unit. Signals coming from four GPS satellites are detected and locked on, for further time synchronisation and on board position determination.
The GPS consists of a
GPS antenna
mounted on the face of the satellite and a receiver which interfaces with the transputer processing unit. Signals coming from four GPS satellites are detected and locked on, for further time synchronisation and on board position determination.
Cosmic Ray experiment (CRE)
- This experiment measures the radiation of ionised radiation accumulated at seven zones within the satellite. Radiation maps can be constructed to help select electronic components for use a space environment.
Digital Signal processing experiment (DSPE)
- This experiment is based on two signal processors from Texas Instruments (C25 and C30), to test new modulation/demodulation techniques. The system is able to process audio signals from the uplink.
For more technical information please contact Elena Koroleva.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}